


047 – MicroPython TechNotes: E108 GPS

In this article, I will discuss how you can use a GPS module with ESP32 using MicroPython.
GPS is an acronym which stands for Global Positioning System. With the help of GPS, we can determine our location called coordinates which is mainly composed of the latitude, the longitude, and the altitude.
The latitude is the angle formed between the equator and a certain location of the Earth. A positive latitude value when going North while a negative value when going South. North pole is (+)90 degrees, South Pole is -90 degrees, and of course Equator is 0 degrees. Latitude is the first value for each given coordinates.
The longitude is the angle formed between the Greenwich timeline (Greenwich, England) and a certain location of the Earth. A positive longitude value when going to the East while a negative value when going to the West. In the middle of Pacific ocean is either 180 degrees East or -180 degrees West. Longitude is the second value for each given coordinates.
The altitude is the elevation above the horizon. It is a distance measurement above sea level usually measured in meter unit. Altitude is the third value for each given coordinates.
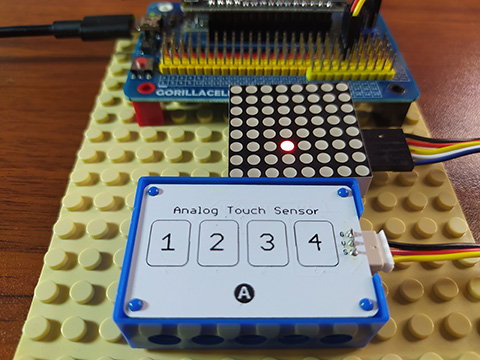
What I have is a GPS module from Gorillacell which is included in the ESP32 development kit. It contains the E108 Integrated Circuit of Chengdu EByte Electronic Technology. The GPS kit also comes with an external antenna for better GPS signal reception.
The E108 GPS module can be connected directly to a computer by connecting it through a type-C USB cable where it appears as a Serial Port device and by using any serial terminal application, you should see a GPS data dump to your app. But it is more beneficial for us to interface it to a microcontroller such as the ESP32 and custom parse the receive data through serial interface.
PINOUT:
BILL OF MATERIALS:
HARDWARE INSTRUCTION:
SOFTWARE INSTRUCTION:
VIDEO DEMONSTRATION:
SOURCE CODE:
1. Example # 1:
# More details can be found in TechToTinker.blogspot.com
# George Bantique | tech.to.tinker@gmail.com
from machine import Pin
from machine import SoftI2C
from machine import UART
from micropyGPS import MicropyGPS
from ssd1306 import SSD1306_I2C
def main():
uart = UART(1, rx=25, tx=26, baudrate=9600, bits=8, parity=None, stop=1, timeout=5000, rxbuf=1024)
gps = MicropyGPS()
i2c = SoftI2C(scl=Pin(22), sda=Pin(21), freq=400000)
oled = SSD1306_I2C(128, 64, i2c, addr=0x3C)
led = Pin(2, Pin.OUT)
while True:
buf = uart.readline()
for char in buf:
gps.update(chr(char)) # Note the conversion to to chr, UART outputs ints normally
print('UTC Timestamp:', gps.timestamp)
print('Date:', gps.date_string('long'))
print('Satellites:', gps.satellites_in_use)
print('Altitude:', gps.altitude)
print('Latitude:', gps.latitude)
print('Longitude:', gps.longitude_string())
print('Horizontal Dilution of Precision:', gps.hdop)
print()
oled.fill(0)
oled.text('Date:{}'.format(gps.date_string('s_mdy')),0,0)
oled.text('Sat:{}'.format(gps.satellites_in_use),0,10)
oled.text('Alt:{}'.format(gps.altitude),0,20)
oled.text('{}'.format(gps.latitude_string()),0,35)
oled.text('{}'.format(gps.longitude_string()),0,45)
oled.show()
led.value(not led.value())
# def startGPSthread():
# _thread.start_new_thread(main, ())
if __name__ == "__main__":
print('...running main, GPS testing')
main()
2. microGPS.py
"""
# MicropyGPS - a GPS NMEA sentence parser for Micropython/Python 3.X
# Copyright (c) 2017 Michael Calvin McCoy (calvin.mccoy@protonmail.com)
# The MIT License (MIT) - see LICENSE file
"""
# TODO:
# Time Since First Fix
# Distance/Time to Target
# More Helper Functions
# Dynamically limit sentences types to parse
from math import floor, modf
# Import utime or time for fix time handling
try:
# Assume running on MicroPython
import utime
except ImportError:
# Otherwise default to time module for non-embedded implementations
# Should still support millisecond resolution.
import time
class MicropyGPS(object):
"""GPS NMEA Sentence Parser. Creates object that stores all relevant GPS data and statistics.
Parses sentences one character at a time using update(). """
# Max Number of Characters a valid sentence can be (based on GGA sentence)
SENTENCE_LIMIT = 90
__HEMISPHERES = ('N', 'S', 'E', 'W')
__NO_FIX = 1
__FIX_2D = 2
__FIX_3D = 3
__DIRECTIONS = ('N', 'NNE', 'NE', 'ENE', 'E', 'ESE', 'SE', 'SSE', 'S', 'SSW', 'SW', 'WSW', 'W',
'WNW', 'NW', 'NNW')
__MONTHS = ('January', 'February', 'March', 'April', 'May',
'June', 'July', 'August', 'September', 'October',
'November', 'December')
def __init__(self, local_offset=0, location_formatting='ddm'):
"""
Setup GPS Object Status Flags, Internal Data Registers, etc
local_offset (int): Timzone Difference to UTC
location_formatting (str): Style For Presenting Longitude/Latitude:
Decimal Degree Minute (ddm) - 40° 26.767′ N
Degrees Minutes Seconds (dms) - 40° 26′ 46″ N
Decimal Degrees (dd) - 40.446° N
"""
#####################
# Object Status Flags
self.sentence_active = False
self.active_segment = 0
self.process_crc = False
self.gps_segments = []
self.crc_xor = 0
self.char_count = 0
self.fix_time = 0
#####################
# Sentence Statistics
self.crc_fails = 0
self.clean_sentences = 0
self.parsed_sentences = 0
#####################
# Logging Related
self.log_handle = None
self.log_en = False
#####################
# Data From Sentences
# Time
self.timestamp = [0, 0, 0]
self.date = [0, 0, 0]
self.local_offset = local_offset
# Position/Motion
self._latitude = [0, 0.0, 'N']
self._longitude = [0, 0.0, 'W']
self.coord_format = location_formatting
self.speed = [0.0, 0.0, 0.0]
self.course = 0.0
self.altitude = 0.0
self.geoid_height = 0.0
# GPS Info
self.satellites_in_view = 0
self.satellites_in_use = 0
self.satellites_used = []
self.last_sv_sentence = 0
self.total_sv_sentences = 0
self.satellite_data = dict()
self.hdop = 0.0
self.pdop = 0.0
self.vdop = 0.0
self.valid = False
self.fix_stat = 0
self.fix_type = 1
########################################
# Coordinates Translation Functions
########################################
@property
def latitude(self):
"""Format Latitude Data Correctly"""
if self.coord_format == 'dd':
decimal_degrees = self._latitude[0] + (self._latitude[1] / 60)
return [decimal_degrees, self._latitude[2]]
elif self.coord_format == 'dms':
minute_parts = modf(self._latitude[1])
seconds = round(minute_parts[0] * 60)
return [self._latitude[0], int(minute_parts[1]), seconds, self._latitude[2]]
else:
return self._latitude
@property
def longitude(self):
"""Format Longitude Data Correctly"""
if self.coord_format == 'dd':
decimal_degrees = self._longitude[0] + (self._longitude[1] / 60)
return [decimal_degrees, self._longitude[2]]
elif self.coord_format == 'dms':
minute_parts = modf(self._longitude[1])
seconds = round(minute_parts[0] * 60)
return [self._longitude[0], int(minute_parts[1]), seconds, self._longitude[2]]
else:
return self._longitude
########################################
# Logging Related Functions
########################################
def start_logging(self, target_file, mode="append"):
"""
Create GPS data log object
"""
# Set Write Mode Overwrite or Append
mode_code = 'w' if mode == 'new' else 'a'
try:
self.log_handle = open(target_file, mode_code)
except AttributeError:
print("Invalid FileName")
return False
self.log_en = True
return True
def stop_logging(self):
"""
Closes the log file handler and disables further logging
"""
try:
self.log_handle.close()
except AttributeError:
print("Invalid Handle")
return False
self.log_en = False
return True
def write_log(self, log_string):
"""Attempts to write the last valid NMEA sentence character to the active file handler
"""
try:
self.log_handle.write(log_string)
except TypeError:
return False
return True
########################################
# Sentence Parsers
########################################
def gprmc(self):
"""Parse Recommended Minimum Specific GPS/Transit data (RMC)Sentence.
Updates UTC timestamp, latitude, longitude, Course, Speed, Date, and fix status
"""
# UTC Timestamp
try:
utc_string = self.gps_segments[1]
if utc_string: # Possible timestamp found
hours = (int(utc_string[0:2]) + self.local_offset) % 24
minutes = int(utc_string[2:4])
seconds = float(utc_string[4:])
self.timestamp = (hours, minutes, seconds)
else: # No Time stamp yet
self.timestamp = (0, 0, 0)
except ValueError: # Bad Timestamp value present
return False
# Date stamp
try:
date_string = self.gps_segments[9]
# Date string printer function assumes to be year >=2000,
# date_string() must be supplied with the correct century argument to display correctly
if date_string: # Possible date stamp found
day = int(date_string[0:2])
month = int(date_string[2:4])
year = int(date_string[4:6])
self.date = (day, month, year)
else: # No Date stamp yet
self.date = (0, 0, 0)
except ValueError: # Bad Date stamp value present
return False
# Check Receiver Data Valid Flag
if self.gps_segments[2] == 'A': # Data from Receiver is Valid/Has Fix
# Longitude / Latitude
try:
# Latitude
l_string = self.gps_segments[3]
lat_degs = int(l_string[0:2])
lat_mins = float(l_string[2:])
lat_hemi = self.gps_segments[4]
# Longitude
l_string = self.gps_segments[5]
lon_degs = int(l_string[0:3])
lon_mins = float(l_string[3:])
lon_hemi = self.gps_segments[6]
except ValueError:
return False
if lat_hemi not in self.__HEMISPHERES:
return False
if lon_hemi not in self.__HEMISPHERES:
return False
# Speed
try:
spd_knt = float(self.gps_segments[7])
except ValueError:
return False
# Course
try:
if self.gps_segments[8]:
course = float(self.gps_segments[8])
else:
course = 0.0
except ValueError:
return False
# TODO - Add Magnetic Variation
# Update Object Data
self._latitude = [lat_degs, lat_mins, lat_hemi]
self._longitude = [lon_degs, lon_mins, lon_hemi]
# Include mph and hm/h
self.speed = [spd_knt, spd_knt * 1.151, spd_knt * 1.852]
self.course = course
self.valid = True
# Update Last Fix Time
self.new_fix_time()
else: # Clear Position Data if Sentence is 'Invalid'
self._latitude = [0, 0.0, 'N']
self._longitude = [0, 0.0, 'W']
self.speed = [0.0, 0.0, 0.0]
self.course = 0.0
self.valid = False
return True
def gpgll(self):
"""Parse Geographic Latitude and Longitude (GLL)Sentence. Updates UTC timestamp, latitude,
longitude, and fix status"""
# UTC Timestamp
try:
utc_string = self.gps_segments[5]
if utc_string: # Possible timestamp found
hours = (int(utc_string[0:2]) + self.local_offset) % 24
minutes = int(utc_string[2:4])
seconds = float(utc_string[4:])
self.timestamp = (hours, minutes, seconds)
else: # No Time stamp yet
self.timestamp = (0, 0, 0)
except ValueError: # Bad Timestamp value present
return False
# Check Receiver Data Valid Flag
if self.gps_segments[6] == 'A': # Data from Receiver is Valid/Has Fix
# Longitude / Latitude
try:
# Latitude
l_string = self.gps_segments[1]
lat_degs = int(l_string[0:2])
lat_mins = float(l_string[2:])
lat_hemi = self.gps_segments[2]
# Longitude
l_string = self.gps_segments[3]
lon_degs = int(l_string[0:3])
lon_mins = float(l_string[3:])
lon_hemi = self.gps_segments[4]
except ValueError:
return False
if lat_hemi not in self.__HEMISPHERES:
return False
if lon_hemi not in self.__HEMISPHERES:
return False
# Update Object Data
self._latitude = [lat_degs, lat_mins, lat_hemi]
self._longitude = [lon_degs, lon_mins, lon_hemi]
self.valid = True
# Update Last Fix Time
self.new_fix_time()
else: # Clear Position Data if Sentence is 'Invalid'
self._latitude = [0, 0.0, 'N']
self._longitude = [0, 0.0, 'W']
self.valid = False
return True
def gpvtg(self):
"""Parse Track Made Good and Ground Speed (VTG) Sentence. Updates speed and course"""
try:
course = float(self.gps_segments[1])
spd_knt = float(self.gps_segments[5])
except ValueError:
return False
# Include mph and km/h
self.speed = (spd_knt, spd_knt * 1.151, spd_knt * 1.852)
self.course = course
return True
def gpgga(self):
"""Parse Global Positioning System Fix Data (GGA) Sentence. Updates UTC timestamp, latitude, longitude,
fix status, satellites in use, Horizontal Dilution of Precision (HDOP), altitude, geoid height and fix status"""
try:
# UTC Timestamp
utc_string = self.gps_segments[1]
# Skip timestamp if receiver doesn't have on yet
if utc_string:
hours = (int(utc_string[0:2]) + self.local_offset) % 24
minutes = int(utc_string[2:4])
seconds = float(utc_string[4:])
else:
hours = 0
minutes = 0
seconds = 0.0
# Number of Satellites in Use
satellites_in_use = int(self.gps_segments[7])
# Get Fix Status
fix_stat = int(self.gps_segments[6])
except (ValueError, IndexError):
return False
try:
# Horizontal Dilution of Precision
hdop = float(self.gps_segments[8])
except (ValueError, IndexError):
hdop = 0.0
# Process Location and Speed Data if Fix is GOOD
if fix_stat:
# Longitude / Latitude
try:
# Latitude
l_string = self.gps_segments[2]
lat_degs = int(l_string[0:2])
lat_mins = float(l_string[2:])
lat_hemi = self.gps_segments[3]
# Longitude
l_string = self.gps_segments[4]
lon_degs = int(l_string[0:3])
lon_mins = float(l_string[3:])
lon_hemi = self.gps_segments[5]
except ValueError:
return False
if lat_hemi not in self.__HEMISPHERES:
return False
if lon_hemi not in self.__HEMISPHERES:
return False
# Altitude / Height Above Geoid
try:
altitude = float(self.gps_segments[9])
geoid_height = float(self.gps_segments[11])
except ValueError:
altitude = 0
geoid_height = 0
# Update Object Data
self._latitude = [lat_degs, lat_mins, lat_hemi]
self._longitude = [lon_degs, lon_mins, lon_hemi]
self.altitude = altitude
self.geoid_height = geoid_height
# Update Object Data
self.timestamp = [hours, minutes, seconds]
self.satellites_in_use = satellites_in_use
self.hdop = hdop
self.fix_stat = fix_stat
# If Fix is GOOD, update fix timestamp
if fix_stat:
self.new_fix_time()
return True
def gpgsa(self):
"""Parse GNSS DOP and Active Satellites (GSA) sentence. Updates GPS fix type, list of satellites used in
fix calculation, Position Dilution of Precision (PDOP), Horizontal Dilution of Precision (HDOP), Vertical
Dilution of Precision, and fix status"""
# Fix Type (None,2D or 3D)
try:
fix_type = int(self.gps_segments[2])
except ValueError:
return False
# Read All (up to 12) Available PRN Satellite Numbers
sats_used = []
for sats in range(12):
sat_number_str = self.gps_segments[3 + sats]
if sat_number_str:
try:
sat_number = int(sat_number_str)
sats_used.append(sat_number)
except ValueError:
return False
else:
break
# PDOP,HDOP,VDOP
try:
pdop = float(self.gps_segments[15])
hdop = float(self.gps_segments[16])
vdop = float(self.gps_segments[17])
except ValueError:
return False
# Update Object Data
self.fix_type = fix_type
# If Fix is GOOD, update fix timestamp
if fix_type > self.__NO_FIX:
self.new_fix_time()
self.satellites_used = sats_used
self.hdop = hdop
self.vdop = vdop
self.pdop = pdop
return True
def gpgsv(self):
"""Parse Satellites in View (GSV) sentence. Updates number of SV Sentences,the number of the last SV sentence
parsed, and data on each satellite present in the sentence"""
try:
num_sv_sentences = int(self.gps_segments[1])
current_sv_sentence = int(self.gps_segments[2])
sats_in_view = int(self.gps_segments[3])
except ValueError:
return False
# Create a blank dict to store all the satellite data from this sentence in:
# satellite PRN is key, tuple containing telemetry is value
satellite_dict = dict()
# Calculate Number of Satelites to pull data for and thus how many segment positions to read
if num_sv_sentences == current_sv_sentence:
# Last sentence may have 1-4 satellites; 5 - 20 positions
sat_segment_limit = (sats_in_view - ((num_sv_sentences - 1) * 4)) * 5
else:
sat_segment_limit = 20 # Non-last sentences have 4 satellites and thus read up to position 20
# Try to recover data for up to 4 satellites in sentence
for sats in range(4, sat_segment_limit, 4):
# If a PRN is present, grab satellite data
if self.gps_segments[sats]:
try:
sat_id = int(self.gps_segments[sats])
except (ValueError,IndexError):
return False
try: # elevation can be null (no value) when not tracking
elevation = int(self.gps_segments[sats+1])
except (ValueError,IndexError):
elevation = None
try: # azimuth can be null (no value) when not tracking
azimuth = int(self.gps_segments[sats+2])
except (ValueError,IndexError):
azimuth = None
try: # SNR can be null (no value) when not tracking
snr = int(self.gps_segments[sats+3])
except (ValueError,IndexError):
snr = None
# If no PRN is found, then the sentence has no more satellites to read
else:
break
# Add Satellite Data to Sentence Dict
satellite_dict[sat_id] = (elevation, azimuth, snr)
# Update Object Data
self.total_sv_sentences = num_sv_sentences
self.last_sv_sentence = current_sv_sentence
self.satellites_in_view = sats_in_view
# For a new set of sentences, we either clear out the existing sat data or
# update it as additional SV sentences are parsed
if current_sv_sentence == 1:
self.satellite_data = satellite_dict
else:
self.satellite_data.update(satellite_dict)
return True
##########################################
# Data Stream Handler Functions
##########################################
def new_sentence(self):
"""Adjust Object Flags in Preparation for a New Sentence"""
self.gps_segments = ['']
self.active_segment = 0
self.crc_xor = 0
self.sentence_active = True
self.process_crc = True
self.char_count = 0
def update(self, new_char):
"""Process a new input char and updates GPS object if necessary based on special characters ('
This comment has been removed by a blog administrator.