004 - ESP32 MicroPython: External Interrupts
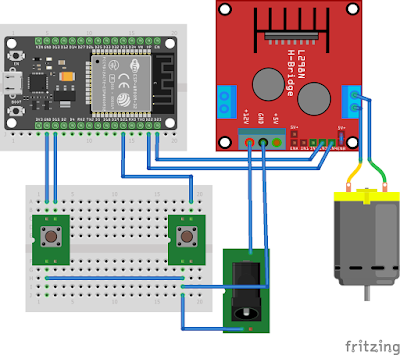
Circuit Diagram for Example 3
Video Demonstration
Source Code
Example 1, Simple Polling:
1"""
2*** Simple Polling Method of reading an input ***
3
4 Author: George V. Bantique, TechToTinker
5 Date: September 10, 2020
6 Description: The switch or the BOOT switch is
7 polled until such time that the switch
8 is detected at logic LOW
9 When the switch is press, it will blink
10 the onboard LED on GPIO2 for 7 times then
11 will send a 'Done.' message before it exit
12"""
13import machine
14import time
15
16led = machine.Pin(2, machine.Pin.OUT)
17sw = machine.Pin(0, machine.Pin.IN)
18
19def blink_led_ntimes(num, t_on, t_off, msg):
20 counter = 0
21 while (counter < num):
22 led.on()
23 time.sleep(t_on)
24 led.off()
25 time.sleep(t_off)
26 counter += 1
27 print (msg)
28
29while True:
30 if (sw.value() == 0):
31 blink_led_ntimes(7, 0.25, 0.50, 'Done.')
py
Example 2, Simple Interrupt:
1"""
2*** Simple Interrupt Method of reading an input ***
3
4 Author: George V. Bantique, TechToTinker
5 Date: September 10, 2020
6 Description: The switch or the BOOT switch is
7 attached to interrupt for efficiency.
8 When the interrupt is triggered, it will
9 toggle the state of the onboard LED
10 on GPIO2.
11"""
12import machine
13
14led = machine.Pin(2, machine.Pin.OUT)
15sw = machine.Pin(0, machine.Pin.IN)
16
17def handle_interrupt(pin):
18 led.value(not led.value())
19
20sw.irq(trigger=machine.Pin.IRQ_FALLING, handler=handle_interrupt)
py
Example 3, DC motor with limit switch using interrupts:
1"""
2*** DC motor with limit switch using interrupts ***
3 Author: George V. Bantique, TechToTinker
4 Date: September 10, 2020
5 Description: The direction of rotation of the DC motor
6 is controlled by the limit switch in the
7 left or right side. L298N motor driver module
8 is use to isolate and protect the ESP32.
9"""
10
11import machine
12
13sw1 = machine.Pin(15, machine.Pin.IN, machine.Pin.PULL_UP)
14sw2 = machine.Pin(21, machine.Pin.IN, machine.Pin.PULL_UP)
15dr1 = machine.Pin(22, machine.Pin.OUT)
16dr2 = machine.Pin(23, machine.Pin.OUT)
17
18press = False
19irq_pin = 0
20
21def handle_interrupt(pin):
22 global press
23 press = True
24 global irq_pin
25 irq_pin = int(str(pin)[4:-1])
26
27sw1.irq(trigger=machine.Pin.IRQ_FALLING, handler=handle_interrupt)
28sw2.irq(trigger=machine.Pin.IRQ_FALLING, handler=handle_interrupt)
29
30while True:
31 if press:
32 print(irq_pin)
33 press = False
34
35 if irq_pin == 15:
36 dr1.value(0)
37 dr2.value(1)
38 print('counter')
39 elif irq_pin == 21:
40 dr1.value(1)
41 dr2.value(0)
42 print('clockwise')
43 else:
44 pass
py
Posts in this series
- 026 - ESP32 MicroPython: MFRC522 RFID Module
- 025 - ESP32 MicroPython: ESP32 Bluetooth Low Energy
- 024 - ESP32 MicroPython: How to Use SD Card in MicroPython
- 023 - ESP32 MicroPython: Binary Clock
- 022 - ESP32 MicroPython: MQTT Part 2: Subscribe
- 021 - ESP32 MicroPython: MQTT Part 1: Publish
- 020 - ESP32 MicroPython: RESTful APIs | Demo READ and WRITE
- 019 - ESP32 MicroPython: OpenWeather | RESTful APIs
- 018 - ESP32 MicroPython: Thingspeak | RESTful APIs
- 017 - ESP32 MicroPython: DHT Values Auto Updates using AJAX
- 016 - ESP32 MicroPython: Web Server | ESP32 Access Point
- 015 - ESP32 MicroPython: Web Server | ESP32 Station Mode in MicroPython
- 014 - ESP32 MicroPython: SIM800L GSM Module in MicroPython
- 013 - ESP32 MicroPython: UART Serial in MicroPython
- 012 - ESP32 MicroPython: HC-SR04 Ultrasonic Sensor in MicroPython
- 011 - ESP32 MicroPython: DHT11, DHT22 in MicroPython
- 010 - ESP32 MicroPython: 0.96 OLED in MicroPython
- 009 - ESP32 MicroPython: Non-blocking Delays and Multithreading | Multitasking
- 008 - ESP32 MicroPython: Hardware Timer Interrupts
- 007 - ESP32 MicroPython: How to make some sound with MicroPython
- 006 - ESP32 MicroPython: How to control servo motor with MicroPython
- 005 - ESP32 MicroPython: Pulse Width Modulation
- 003 - ESP32 MicroPython: General Purpose Input Output | GPIO Pins
- 001 - ESP32 MicroPython: What is MicroPython
- 000 - ESP32 MicroPython: How to Get Started with MicroPython
No comments yet!