004 - ESP32 MicroPython: External Interrupts
Table of Contents
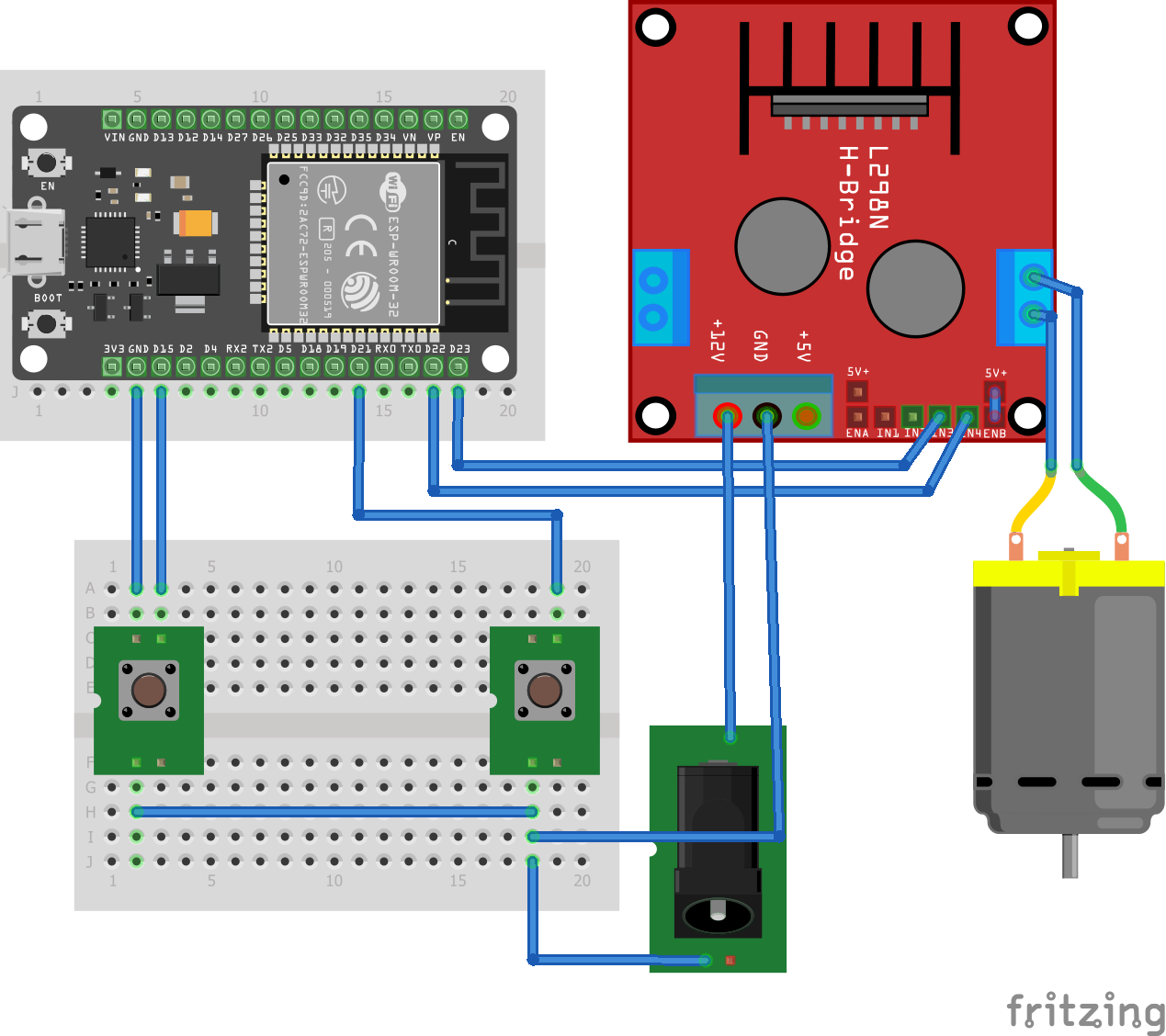
Circuit Diagram for Example 3
VIDEO DEMONSTRATION
SOURCE CODE
Example 1, Simple Polling
"""
*** Simple Polling Method of reading an input ***
Author: George V. Bantique, TechToTinker
Date: September 10, 2020
Description: The switch or the BOOT switch is
polled until such time that the switch
is detected at logic LOW
When the switch is press, it will blink
the onboard LED on GPIO2 for 7 times then
will send a 'Done.' message before it exit
"""
import machine
import time
led = machine.Pin(2, machine.Pin.OUT)
sw = machine.Pin(0, machine.Pin.IN)
def blink_led_ntimes(num, t_on, t_off, msg):
counter = 0
while (counter < num):
led.on()
time.sleep(t_on)
led.off()
time.sleep(t_off)
counter += 1
print (msg)
while True:
if (sw.value() == 0):
blink_led_ntimes(7, 0.25, 0.50, 'Done.')Example 2, Simple Interrupt
"""
*** Simple Interrupt Method of reading an input ***
Author: George V. Bantique, TechToTinker
Date: September 10, 2020
Description: The switch or the BOOT switch is
attached to interrupt for efficiency.
When the interrupt is triggered, it will
toggle the state of the onboard LED
on GPIO2.
"""
import machine
led = machine.Pin(2, machine.Pin.OUT)
sw = machine.Pin(0, machine.Pin.IN)
def handle_interrupt(pin):
led.value(not led.value())
sw.irq(trigger=machine.Pin.IRQ_FALLING, handler=handle_interrupt)Example 3, DC motor with limit switch using interrupts
"""
*** DC motor with limit switch using interrupts ***
Author: George V. Bantique, TechToTinker
Date: September 10, 2020
Description: The direction of rotation of the DC motor
is controlled by the limit switch in the
left or right side. L298N motor driver module
is use to isolate and protect the ESP32.
"""
import machine
sw1 = machine.Pin(15, machine.Pin.IN, machine.Pin.PULL_UP)
sw2 = machine.Pin(21, machine.Pin.IN, machine.Pin.PULL_UP)
dr1 = machine.Pin(22, machine.Pin.OUT)
dr2 = machine.Pin(23, machine.Pin.OUT)
press = False
irq_pin = 0
def handle_interrupt(pin):
global press
press = True
global irq_pin
irq_pin = int(str(pin)[4:-1])
sw1.irq(trigger=machine.Pin.IRQ_FALLING, handler=handle_interrupt)
sw2.irq(trigger=machine.Pin.IRQ_FALLING, handler=handle_interrupt)
while True:
if press:
print(irq_pin)
press = False
if irq_pin == 15:
dr1.value(0)
dr2.value(1)
print('counter')
elif irq_pin == 21:
dr1.value(1)
dr2.value(0)
print('clockwise')
else:
pass
×
![]()

Thx!! ur tutorial of MicroPython really help me, thanks a lot!!
Glad you found it helpful. Thank you.
Thank you for the tutorial.
But I did not understand the following
irq_pin = int(str(pin)[4:-1])
It was use for parsing the actual pin number. You may want to see the raw value by modifying the interrupt call as follows:
def handle_interrupt(pin):
global press
press = True
global irq_pin
print(irq_pin)
irq_pin = int(str(pin)[4:-1])
Cheers, George.
Thank You very mutch George Bantique!
thank you