006 - ESP32 MicroPython: How to control servo motor with MicroPython
Table of Contents
CIRCUIT DIAGRAM
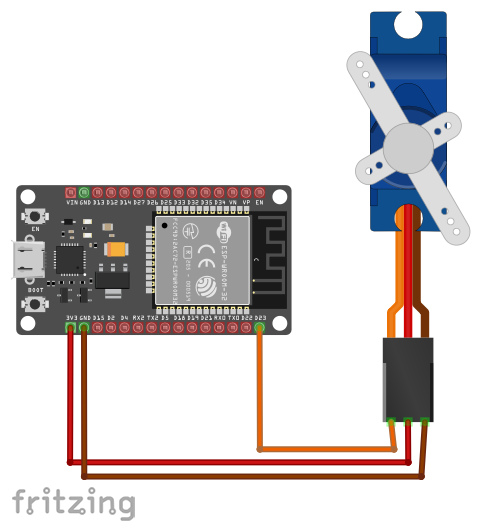
Links to SG90 datasheet: http://www.ee.ic.ac.uk/pcheung/teaching/DE1_EE/stores/sg90_datasheet.pdf
Links to Arduino map() function: https://www.arduino.cc/reference/en/language/functions/math/map/
Some formulas use
freq = 1 / Period
freq = 1 / 20ms
freq = 50Hz
1ms / 20ms = 0.05 = 5% duty cycle
2ms / 20ms = 0.10 = 10% duty cycle
To get the equivalent pwm duty values:
0.05 * 1024 = 51.2
0.10 * 1024 = 102.4These pwm duty values does not work for me, it gives very inaccurate result angle.
What works for me are a duty values of 20 to 120 or equivalent to 2% to 12% duty cycle.
VIDEO DEMONSTRATION
CALL TO ACTION
If you found this tutorial as helpful, please consider supporting my Youtube channel by Suscribing to TechToTinker Youtube channel. Click this to Subscribe.
SOURCE CODE
# Load the machine module for GPIO and PWM
# Control servo motor with MicroPython
# Author: George Bantique, TechToTinker
# Date: September 15, 2020
import machine
# Load the time module for the delays
import time
# Create a regular p23 GPIO object
p23 = machine.Pin(23, machine.Pin.OUT)
# Create another object named pwm by
# attaching the pwm driver to the pin
pwm = machine.PWM(p23)
# Set the pulse every 20ms
pwm.freq(50)
# Set initial duty to 0
# to turn off the pulse
pwm.duty(0)
# Creates a function for mapping the 0 to 180 degrees
# to 20 to 120 pwm duty values
def map(x, in_min, in_max, out_min, out_max):
return int((x - in_min) * (out_max - out_min) / (in_max - in_min) + out_min)
# Creates another function for turning
# the servo according to input angle
def servo(pin, angle):
pin.duty(map(angle, 0, 180, 20, 120))
# To rotate the servo motor to 0 degrees
servo(pwm, 0)
# To rotate the servo motor to 90 degrees
servo(pwm, 90)
# To rotate the servo motor to 180 degrees
servo(pwm, 180)
# To rotate the servo from 0 to 180 degrees
# by 10 degrees increment
for i in range(0, 181, 10):
servo(pwm, i)
time.sleep(0.5)
# To rotate the servo from 180 to 0 degrees
# by 10 degrees decrement
for i in range(180, -1, -10):
servo(pwm, i)
time.sleep(0.5)
×
![]()

my servo doesnt turn running the first 3 lines
Hi @ReallyEpicShit, what do you mean? Can you further elaborate?
put delay