031 - MicroPython TechNotes: TOF Distance Sensor
Table of Contents
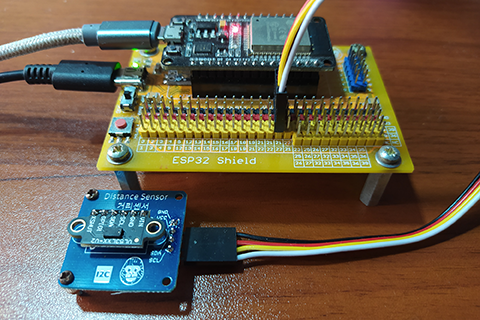
PINOUT
- GND – for the ground pin.
- VCC – for the supply voltage.
- SDA – for the i2c serial data pin.
- SCL – for the i2c serial clock pin.
HARDWARE INSTRUCTION
- First, attach the ESP32 board on top the ESP32 shield and make sure that both USB port are on the same side.
- Next, attach the dupont wire to the TOF distance sensor by following the color coding which is black for the ground, red for the VCC, yellow for the SDA pin, and white for the SCL pin.
- Next, attach the other end of the dupont wire by matching the color of the wire to the colors of the pin headers which is black to black, red to red, and yellow and the following colors to the yellow pin headers. In this experiment, I choose GPIO 21 for the SDA pin and GPIO 22 for the SCL pin.
- Next, power the ESP32 shield with an external power supply through a type-C USB cable and make sure that the power switch is set to ON state.
- Lastly, connect ESP32 to the computer by connecting a micro USB cable.
SOFTWARE INSTRUCTION
- Copy the vl53l0x.py driver library to ESP32 MicroPython Device root directory by clicking the File menu and select Save As. Click MicroPython Device and save it as vl53l0x.py and click OK.
- Copy the example source code and paste it to Thonny IDE. Play with it and adapt it according to your wants.
- Enjoy tinkering.
VIDEO DEMONSTRATION
CALL TO ACTION
For any concern, write your message in the comment section. You might also like to support my journey on Youtube by Subscribing. Click this to Subscribe to TechToTinker. Thank you and have a good days ahead. See you, – George Bantique | tech.to.tinker@gmail.comSOURCE CODE
1. Example # 1, exploring the basics of TOF distance sensor
# More details can be found in TechToTinker.blogspot.com
# George Bantique | tech.to.tinker@gmail.com
from machine import Pin
from machine import I2C
from vl53l0x import VL53L0X
I2C_bus = I2C(0, sda=Pin(21), scl=Pin(22))
tof = VL53L0X(I2C_bus)
# The following lines of code should be tested using the REPL:
# 1. To enable/start the tof:
# tof.start()
# 2. To read the current tof value:
# tof.read()
# 3. To disable/stop the tof:
# tof.stop()
2. Example # 2, simple application of TOF distance sensor
# More details can be found in TechToTinker.blogspot.com
# George Bantique | tech.to.tinker@gmail.com
from vl53l0x import VL53L0X
from machine import I2C
from machine import Pin
from time import ticks_ms
led = Pin(2, Pin.OUT)
I2C_bus = I2C(0, sda=Pin(21), scl=Pin(22))
tof = VL53L0X(I2C_bus)
timer_start = ticks_ms()
while True:
tof.start()
distance = tof.read()
tof.stop()
if ticks_ms() - timer_start >= distance:
led.value(not led.value())
timer_start = ticks_ms()
3. vl53l0x.py driver library for VL53L0X TOF
from micropython import const
import ustruct
import utime
from machine import Timer
import time
_IO_TIMEOUT = 1000
_SYSRANGE_START = const(0x00)
_EXTSUP_HV = const(0x89)
_MSRC_CONFIG = const(0x60)
_FINAL_RATE_RTN_LIMIT = const(0x44)
_SYSTEM_SEQUENCE = const(0x01)
_SPAD_REF_START = const(0x4f)
_SPAD_ENABLES = const(0xb0)
_REF_EN_START_SELECT = const(0xb6)
_SPAD_NUM_REQUESTED = const(0x4e)
_INTERRUPT_GPIO = const(0x0a)
_INTERRUPT_CLEAR = const(0x0b)
_GPIO_MUX_ACTIVE_HIGH = const(0x84)
_RESULT_INTERRUPT_STATUS = const(0x13)
_RESULT_RANGE_STATUS = const(0x14)
_OSC_CALIBRATE = const(0xf8)
_MEASURE_PERIOD = const(0x04)
SYSRANGE_START = 0x00
SYSTEM_THRESH_HIGH = 0x0C
SYSTEM_THRESH_LOW = 0x0E
SYSTEM_SEQUENCE_CONFIG = 0x01
SYSTEM_RANGE_CONFIG = 0x09
SYSTEM_INTERMEASUREMENT_PERIOD = 0x04
SYSTEM_INTERRUPT_CONFIG_GPIO = 0x0A
GPIO_HV_MUX_ACTIVE_HIGH = 0x84
SYSTEM_INTERRUPT_CLEAR = 0x0B
RESULT_INTERRUPT_STATUS = 0x13
RESULT_RANGE_STATUS = 0x14
RESULT_CORE_AMBIENT_WINDOW_EVENTS_RTN = 0xBC
RESULT_CORE_RANGING_TOTAL_EVENTS_RTN = 0xC0
RESULT_CORE_AMBIENT_WINDOW_EVENTS_REF = 0xD0
RESULT_CORE_RANGING_TOTAL_EVENTS_REF = 0xD4
RESULT_PEAK_SIGNAL_RATE_REF = 0xB6
ALGO_PART_TO_PART_RANGE_OFFSET_MM = 0x28
I2C_SLAVE_DEVICE_ADDRESS = 0x8A
MSRC_CONFIG_CONTROL = 0x60
PRE_RANGE_CONFIG_MIN_SNR = 0x27
PRE_RANGE_CONFIG_VALID_PHASE_LOW = 0x56
PRE_RANGE_CONFIG_VALID_PHASE_HIGH = 0x57
PRE_RANGE_MIN_COUNT_RATE_RTN_LIMIT = 0x64
FINAL_RANGE_CONFIG_MIN_SNR = 0x67
FINAL_RANGE_CONFIG_VALID_PHASE_LOW = 0x47
FINAL_RANGE_CONFIG_VALID_PHASE_HIGH = 0x48
FINAL_RANGE_CONFIG_MIN_COUNT_RATE_RTN_LIMIT = 0x44
PRE_RANGE_CONFIG_SIGMA_THRESH_HI = 0x61
PRE_RANGE_CONFIG_SIGMA_THRESH_LO = 0x62
PRE_RANGE_CONFIG_VCSEL_PERIOD = 0x50
PRE_RANGE_CONFIG_TIMEOUT_MACROP_HI = 0x51
PRE_RANGE_CONFIG_TIMEOUT_MACROP_LO = 0x52
SYSTEM_HISTOGRAM_BIN = 0x81
HISTOGRAM_CONFIG_INITIAL_PHASE_SELECT = 0x33
HISTOGRAM_CONFIG_READOUT_CTRL = 0x55
FINAL_RANGE_CONFIG_VCSEL_PERIOD = 0x70
FINAL_RANGE_CONFIG_TIMEOUT_MACROP_HI = 0x71
FINAL_RANGE_CONFIG_TIMEOUT_MACROP_LO = 0x72
CROSSTALK_COMPENSATION_PEAK_RATE_MCPS = 0x20
MSRC_CONFIG_TIMEOUT_MACROP = 0x46
SOFT_RESET_GO2_SOFT_RESET_N = 0xBF
IDENTIFICATION_MODEL_ID = 0xC0
IDENTIFICATION_REVISION_ID = 0xC2
OSC_CALIBRATE_VAL = 0xF8
GLOBAL_CONFIG_VCSEL_WIDTH = 0x32
GLOBAL_CONFIG_SPAD_ENABLES_REF_0 = 0xB0
GLOBAL_CONFIG_SPAD_ENABLES_REF_1 = 0xB1
GLOBAL_CONFIG_SPAD_ENABLES_REF_2 = 0xB2
GLOBAL_CONFIG_SPAD_ENABLES_REF_3 = 0xB3
GLOBAL_CONFIG_SPAD_ENABLES_REF_4 = 0xB4
GLOBAL_CONFIG_SPAD_ENABLES_REF_5 = 0xB5
GLOBAL_CONFIG_REF_EN_START_SELECT = 0xB6
DYNAMIC_SPAD_NUM_REQUESTED_REF_SPAD = 0x4E
DYNAMIC_SPAD_REF_EN_START_OFFSET = 0x4F
POWER_MANAGEMENT_GO1_POWER_FORCE = 0x80
VHV_CONFIG_PAD_SCL_SDA__EXTSUP_HV = 0x89
ALGO_PHASECAL_LIM = 0x30
ALGO_PHASECAL_CONFIG_TIMEOUT = 0x30
class TimeoutError(RuntimeError):
pass
class VL53L0X:
def __init__(self, i2c, address=0x29):
self.i2c = i2c
self.address = address
self.init()
self._started = False
self.measurement_timing_budget_us = 0
self.set_measurement_timing_budget(self.measurement_timing_budget_us)
self.enables = {"tcc": 0,
"dss": 0,
"msrc": 0,
"pre_range": 0,
"final_range": 0}
self.timeouts = {"pre_range_vcsel_period_pclks": 0,
"msrc_dss_tcc_mclks": 0,
"msrc_dss_tcc_us": 0,
"pre_range_mclks": 0,
"pre_range_us": 0,
"final_range_vcsel_period_pclks": 0,
"final_range_mclks": 0,
"final_range_us": 0
}
self.vcsel_period_type = ["VcselPeriodPreRange", "VcselPeriodFinalRange"]
def _registers(self, register, values=None, struct='B'):
if values is None:
size = ustruct.calcsize(struct)
data = self.i2c.readfrom_mem(self.address, register, size)
values = ustruct.unpack(struct, data)
return values
data = ustruct.pack(struct, *values)
self.i2c.writeto_mem(self.address, register, data)
def _register(self, register, value=None, struct='B'):
if value is None:
return self._registers(register, struct=struct)[0]
self._registers(register, (value,), struct=struct)
def _flag(self, register=0x00, bit=0, value=None):
data = self._register(register)
mask = 1 << bit
if value is None:
return bool(data & mask)
elif value:
data |= mask
else:
data &= ~mask
self._register(register, data)
def _config(self, *config):
for register, value in config:
self._register(register, value)
def init(self, power2v8=True):
self._flag(_EXTSUP_HV, 0, power2v8)
# I2C standard mode
self._config(
(0x88, 0x00),
(0x80, 0x01),
(0xff, 0x01),
(0x00, 0x00),
)
self._stop_variable = self._register(0x91)
self._config(
(0x00, 0x01),
(0xff, 0x00),
(0x80, 0x00),
)
# disable signal_rate_msrc and signal_rate_pre_range limit checks
self._flag(_MSRC_CONFIG, 1, True)
self._flag(_MSRC_CONFIG, 4, True)
# rate_limit = 0.25
self._register(_FINAL_RATE_RTN_LIMIT, int(0.1 * (1 << 7)),
struct='>H')
self._register(_SYSTEM_SEQUENCE, 0xff)
spad_count, is_aperture = self._spad_info()
spad_map = bytearray(self._registers(_SPAD_ENABLES, struct='6B'))
# set reference spads
self._config(
(0xff, 0x01),
(_SPAD_REF_START, 0x00),
(_SPAD_NUM_REQUESTED, 0x2c),
(0xff, 0x00),
(_REF_EN_START_SELECT, 0xb4),
)
spads_enabled = 0
for i in range(48):
if i < 12 and is_aperture or spads_enabled >= spad_count:
spad_map[i // 8] &= ~(1 << (i >> 2))
elif spad_map[i // 8] & (1 << (i >> 2)):
spads_enabled += 1
self._registers(_SPAD_ENABLES, spad_map, struct='6B')
self._config(
(0xff, 0x01),
(0x00, 0x00),
(0xff, 0x00),
(0x09, 0x00),
(0x10, 0x00),
(0x11, 0x00),
(0x24, 0x01),
(0x25, 0xFF),
(0x75, 0x00),
(0xFF, 0x01),
(0x4E, 0x2C),
(0x48, 0x00),
(0x30, 0x20),
(0xFF, 0x00),
(0x30, 0x09),
(0x54, 0x00),
(0x31, 0x04),
(0x32, 0x03),
(0x40, 0x83),
(0x46, 0x25),
(0x60, 0x00),
(0x27, 0x00),
(0x50, 0x06),
(0x51, 0x00),
(0x52, 0x96),
(0x56, 0x08),
(0x57, 0x30),
(0x61, 0x00),
(0x62, 0x00),
(0x64, 0x00),
(0x65, 0x00),
(0x66, 0xA0),
(0xFF, 0x01),
(0x22, 0x32),
(0x47, 0x14),
(0x49, 0xFF),
(0x4A, 0x00),
(0xFF, 0x00),
(0x7A, 0x0A),
(0x7B, 0x00),
(0x78, 0x21),
(0xFF, 0x01),
(0x23, 0x34),
(0x42, 0x00),
(0x44, 0xFF),
(0x45, 0x26),
(0x46, 0x05),
(0x40, 0x40),
(0x0E, 0x06),
(0x20, 0x1A),
(0x43, 0x40),
(0xFF, 0x00),
(0x34, 0x03),
(0x35, 0x44),
(0xFF, 0x01),
(0x31, 0x04),
(0x4B, 0x09),
(0x4C, 0x05),
(0x4D, 0x04),
(0xFF, 0x00),
(0x44, 0x00),
(0x45, 0x20),
(0x47, 0x08),
(0x48, 0x28),
(0x67, 0x00),
(0x70, 0x04),
(0x71, 0x01),
(0x72, 0xFE),
(0x76, 0x00),
(0x77, 0x00),
(0xFF, 0x01),
(0x0D, 0x01),
(0xFF, 0x00),
(0x80, 0x01),
(0x01, 0xF8),
(0xFF, 0x01),
(0x8E, 0x01),
(0x00, 0x01),
(0xFF, 0x00),
(0x80, 0x00),
)
self._register(_INTERRUPT_GPIO, 0x04)
self._flag(_GPIO_MUX_ACTIVE_HIGH, 4, False)
self._register(_INTERRUPT_CLEAR, 0x01)
# XXX Need to implement this.
# budget = self._timing_budget()
# self._register(_SYSTEM_SEQUENCE, 0xe8)
# self._timing_budget(budget)
self._register(_SYSTEM_SEQUENCE, 0x01)
self._calibrate(0x40)
self._register(_SYSTEM_SEQUENCE, 0x02)
self._calibrate(0x00)
self._register(_SYSTEM_SEQUENCE, 0xe8)
def _spad_info(self):
self._config(
(0x80, 0x01),
(0xff, 0x01),
(0x00, 0x00),
(0xff, 0x06),
)
self._flag(0x83, 3, True)
self._config(
(0xff, 0x07),
(0x81, 0x01),
(0x80, 0x01),
(0x94, 0x6b),
(0x83, 0x00),
)
for timeout in range(_IO_TIMEOUT):
if self._register(0x83):
break
utime.sleep_ms(1)
else:
raise TimeoutError()
self._config(
(0x83, 0x01),
)
value = self._register(0x92)
self._config(
(0x81, 0x00),
(0xff, 0x06),
)
self._flag(0x83, 3, False)
self._config(
(0xff, 0x01),
(0x00, 0x01),
(0xff, 0x00),
(0x80, 0x00),
)
count = value & 0x7f
is_aperture = bool(value & 0b10000000)
return count, is_aperture
def _calibrate(self, vhv_init_byte):
self._register(_SYSRANGE_START, 0x01 | vhv_init_byte)
for timeout in range(_IO_TIMEOUT):
if self._register(_RESULT_INTERRUPT_STATUS) & 0x07:
break
utime.sleep_ms(1)
else:
raise TimeoutError()
self._register(_INTERRUPT_CLEAR, 0x01)
self._register(_SYSRANGE_START, 0x00)
def start(self, period=0):
self._config(
(0x80, 0x01),
(0xFF, 0x01),
(0x00, 0x00),
(0x91, self._stop_variable),
(0x00, 0x01),
(0xFF, 0x00),
(0x80, 0x00),
)
if period:
oscilator = self._register(_OSC_CALIBRATE, struct='>H')
if oscilator:
period *= oscilator
self._register(_MEASURE_PERIOD, period, struct='>H')
self._register(_SYSRANGE_START, 0x04)
else:
self._register(_SYSRANGE_START, 0x02)
self._started = True
def stop(self):
self._register(_SYSRANGE_START, 0x01)
self._config(
(0xFF, 0x01),
(0x00, 0x00),
(0x91, self._stop_variable),
(0x00, 0x01),
(0xFF, 0x00),
)
self._started = False
def read(self):
if not self._started:
self._config(
(0x80, 0x01),
(0xFF, 0x01),
(0x00, 0x00),
(0x91, self._stop_variable),
(0x00, 0x01),
(0xFF, 0x00),
(0x80, 0x00),
(_SYSRANGE_START, 0x01),
)
for timeout in range(_IO_TIMEOUT):
if not self._register(_SYSRANGE_START) & 0x01:
break
utime.sleep_ms(1)
else:
raise TimeoutError()
for timeout in range(_IO_TIMEOUT):
if self._register(_RESULT_INTERRUPT_STATUS) & 0x07:
break
utime.sleep_ms(1)
else:
raise TimeoutError()
value = self._register(_RESULT_RANGE_STATUS + 10, struct='>H')
self._register(_INTERRUPT_CLEAR, 0x01)
return value
def set_signal_rate_limit(self, limit_Mcps):
if limit_Mcps < 0 or limit_Mcps > 511.99:
return False
self._register(0x44, limit_Mcps * (1 << 7))
return True
def decode_Vcsel_period(self, reg_val):
return (((reg_val) + 1) << 1)
def encode_Vcsel_period(self, period_pclks):
return (((period_pclks) >> 1) - 1)
def set_Vcsel_pulse_period(self, type, period_pclks):
vcsel_period_reg = self.encode_Vcsel_period(period_pclks)
self.get_sequence_step_enables()
self.get_sequence_step_timeouts()
if type == self.vcsel_period_type[0]:
if period_pclks == 12:
self._register(PRE_RANGE_CONFIG_VALID_PHASE_HIGH, 0x18)
elif period_pclks == 14:
self._register(PRE_RANGE_CONFIG_VALID_PHASE_HIGH, 0x30)
elif period_pclks == 16:
self._register(PRE_RANGE_CONFIG_VALID_PHASE_HIGH, 0x40)
elif period_pclks == 18:
self._register(PRE_RANGE_CONFIG_VALID_PHASE_HIGH, 0x50)
else:
return False
self._register(PRE_RANGE_CONFIG_VALID_PHASE_LOW, 0x08)
self._register(PRE_RANGE_CONFIG_VCSEL_PERIOD, vcsel_period_reg)
new_pre_range_timeout_mclks = self.timeout_microseconds_to_Mclks(self.timeouts["pre_range_us"],
period_pclks)
self._register(PRE_RANGE_CONFIG_TIMEOUT_MACROP_HI, self.encode_timeout(new_pre_range_timeout_mclks))
new_msrc_timeout_mclks = self.timeout_microseconds_to_Mclks(self.timeouts["msrc_dss_tcc_us"],
period_pclks)
self._register(MSRC_CONFIG_TIMEOUT_MACROP, 255 if new_msrc_timeout_mclks > 256 else (new_msrc_timeout_mclks - 1))
elif type == self.vcsel_period_type[1]:
if period_pclks == 8:
self._register(FINAL_RANGE_CONFIG_VALID_PHASE_HIGH, 0x10)
self._register(FINAL_RANGE_CONFIG_VALID_PHASE_LOW, 0x08)
self._register(GLOBAL_CONFIG_VCSEL_WIDTH, 0x02)
self._(ALGO_PHASECAL_CONFIG_TIMEOUT, 0x0C)
self._register(0xFF, 0x01)
self._register(ALGO_PHASECAL_LIM, 0x30)
self._register(0xFF, 0x00)
elif period_pclks == 10:
self._register(FINAL_RANGE_CONFIG_VALID_PHASE_HIGH, 0x28)
self._register(FINAL_RANGE_CONFIG_VALID_PHASE_LOW, 0x08)
self._register(GLOBAL_CONFIG_VCSEL_WIDTH, 0x03)
self._register(ALGO_PHASECAL_CONFIG_TIMEOUT, 0x09)
self._register(0xFF, 0x01)
self._register(ALGO_PHASECAL_LIM, 0x20)
self._register(0xFF, 0x00)
elif period_pclks == 12:
self._register(FINAL_RANGE_CONFIG_VALID_PHASE_HIGH, 0x38)
self._register(FINAL_RANGE_CONFIG_VALID_PHASE_LOW, 0x08)
self._register(GLOBAL_CONFIG_VCSEL_WIDTH, 0x03)
self._register(ALGO_PHASECAL_CONFIG_TIMEOUT, 0x08)
self._register(0xFF, 0x01)
self._register(ALGO_PHASECAL_LIM, 0x20)
self._register(0xFF, 0x00)
elif period_pclks == 14:
self._register(FINAL_RANGE_CONFIG_VALID_PHASE_HIGH, 0x48)
self._register(FINAL_RANGE_CONFIG_VALID_PHASE_LOW, 0x08)
self._register(GLOBAL_CONFIG_VCSEL_WIDTH, 0x03)
self._register(ALGO_PHASECAL_CONFIG_TIMEOUT, 0x07)
self._register(0xFF, 0x01)
self._register(ALGO_PHASECAL_LIM, 0x20)
self._register(0xFF, 0x00)
else:
return False
self._register(FINAL_RANGE_CONFIG_VCSEL_PERIOD, vcsel_period_reg)
new_final_range_timeout_mclks = self.timeout_microseconds_to_Mclks(self.timeouts["final_range_us"], period_pclks)
if self.enables["pre_range"]:
new_final_range_timeout_mclks += 1
self._register(FINAL_RANGE_CONFIG_TIMEOUT_MACROP_HI, self.encode_timeout(new_final_range_timeout_mclks))
else:
return False
self.set_measurement_timing_budget(self.measurement_timing_budget_us)
sequence_config = self._register(SYSTEM_SEQUENCE_CONFIG)
self._register(SYSTEM_SEQUENCE_CONFIG, 0x02)
self.perform_single_ref_calibration(0x0)
self._register(SYSTEM_SEQUENCE_CONFIG, sequence_config)
return True
def get_sequence_step_enables(self):
sequence_config = self._register(0x01)
self.enables["tcc"] = (sequence_config >> 4) & 0x1
self.enables["dss"] = (sequence_config >> 3) & 0x1
self.enables["msrc"] = (sequence_config >> 2) & 0x1
self.enables["pre_range"] = (sequence_config >> 6) & 0x1
self.enables["final_range"] = (sequence_config >> 7) & 0x1
def get_vcsel_pulse_period(self, type):
if type == self.vcsel_period_type[0]:
return self.decode_Vcsel_period(0x50)
elif type == self.vcsel_period_type[1]:
return self.decode_Vcsel_period(0x70)
else:
return 255
def get_sequence_step_timeouts(self):
self.timeouts["pre_range_vcsel_period_pclks"] = self.get_vcsel_pulse_period(self.vcsel_period_type[0])
self.timeouts["msrc_dss_tcc_mclks"] = int(self._register(MSRC_CONFIG_TIMEOUT_MACROP)) + 1
self.timeouts["msrc_dss_tcc_us"] = self.timeout_Mclks_to_microseconds(self.timeouts["msrc_dss_tcc_mclks"],
self.timeouts[
"pre_range_vcsel_period_pclks"])
self.timeouts["pre_range_mclks"] = self.decode_timeout(PRE_RANGE_CONFIG_TIMEOUT_MACROP_HI)
self.timeouts["pre_range_us"] = self.timeout_Mclks_to_microseconds(self.timeouts["pre_range_mclks"],
self.timeouts[
"pre_range_vcsel_period_pclks"])
self.timeouts["final_range_vcsel_period_pclks"] = self.get_vcsel_pulse_period(self.vcsel_period_type[1])
self.timeouts["final_range_mclks"] = self.decode_timeout(self._register(FINAL_RANGE_CONFIG_TIMEOUT_MACROP_HI))
if self.enables["pre_range"]:
self.timeouts["final_range_mclks"] -= self.timeouts["pre_range_mclks"]
self.timeouts["final_range_us"] = self.timeout_Mclks_to_microseconds(self.timeouts["final_range_mclks"],
self.timeouts[
"final_range_vcsel_period_pclks"])
def timeout_Mclks_to_microseconds(self, timeout_period_mclks, vcsel_period_pclks):
macro_period_ns = self.calc_macro_period(vcsel_period_pclks)
return ((timeout_period_mclks * macro_period_ns) + (macro_period_ns / 2)) / 1000
def timeout_microseconds_to_Mclks(self, timeout_period_us, vcsel_period_pclks):
macro_period_ns = self.calc_macro_period(vcsel_period_pclks)
return (((timeout_period_us * 1000) + (macro_period_ns / 2)) / macro_period_ns)
def calc_macro_period(self, vcsel_period_pclks):
return (((2304 * (vcsel_period_pclks) * 1655) + 500) / 1000)
def decode_timeout(self, reg_val):
return ((reg_val & 0x00FF) << ((reg_val & 0xFF00) >> 8)) + 1
def encode_timeout(self, timeout_mclks):
timeout_mclks = int(timeout_mclks)
ls_byte = 0
ms_byte = 0
if timeout_mclks > 0:
ls_byte = timeout_mclks - 1
while (ls_byte & 0xFFFFFF00) > 0:
ls_byte >>= 1
ms_byte += 1
return (ms_byte << 8) or (ls_byte & 0xFF)
else:
return 0
def set_measurement_timing_budget(self, budget_us):
start_overhead = 1320
end_overhead = 960
msrc_overhead = 660
tcc_overhead = 590
dss_overhead = 690
pre_range_overhead = 660
final_range_overhead = 550
min_timing_budget = 20000
if budget_us < min_timing_budget:
return False
used_budget_us = start_overhead + end_overhead
self.get_sequence_step_enables()
self.get_sequence_step_timeouts()
if self.enables["tcc"]:
used_budget_us += self.timeouts["msrc_dss_tcc_us"] + tcc_overhead
if self.enables["dss"]:
used_budget_us += 2* self.timeouts["msrc_dss_tcc_us"] + dss_overhead
if self.enables["msrc"]:
used_budget_us += self.timeouts["msrc_dss_tcc_us"] + msrc_overhead
if self.enables["pre_range"]:
used_budget_us += self.timeouts["pre_range_us"] + pre_range_overhead
if self.enables["final_range"]:
used_budget_us += final_range_overhead
if used_budget_us > budget_us:
return False
final_range_timeout_us = budget_us - used_budget_us
final_range_timeout_mclks = self.timeout_microseconds_to_Mclks(final_range_timeout_us, self.timeouts["final_range_vcsel_period_pclks"])
if self.enables["pre_range"]:
final_range_timeout_mclks += self.timeouts["pre_range_mclks"]
self._register(FINAL_RANGE_CONFIG_TIMEOUT_MACROP_HI, self.encode_timeout(final_range_timeout_mclks))
self.measurement_timing_budget_us = budget_us
return True
def perform_single_ref_calibration(self, vhv_init_byte):
chrono = Timer.Chrono()
self._register(SYSRANGE_START, 0x01|vhv_init_byte)
chrono.start()
while self._register((RESULT_INTERRUPT_STATUS & 0x07) == 0):
time_elapsed = chrono.read_ms()
if time_elapsed > _IO_TIMEOUT:
return False
self._register(SYSTEM_INTERRUPT_CLEAR, 0x01)
self._register(SYSRANGE_START, 0x00)
return True
REFERENCES AND CREDITS
1. Purchase your Gorillacell ESP32 development kit at: https://gorillacell.kr
×
![]()

When I try to run the code, it says that the Timer class does not have attribute Chrono
Thank you George for this video,
how is possible set the VL53L0X for longer distance?